The idea of this demo is to design and program a robot that can solve a simple maze.
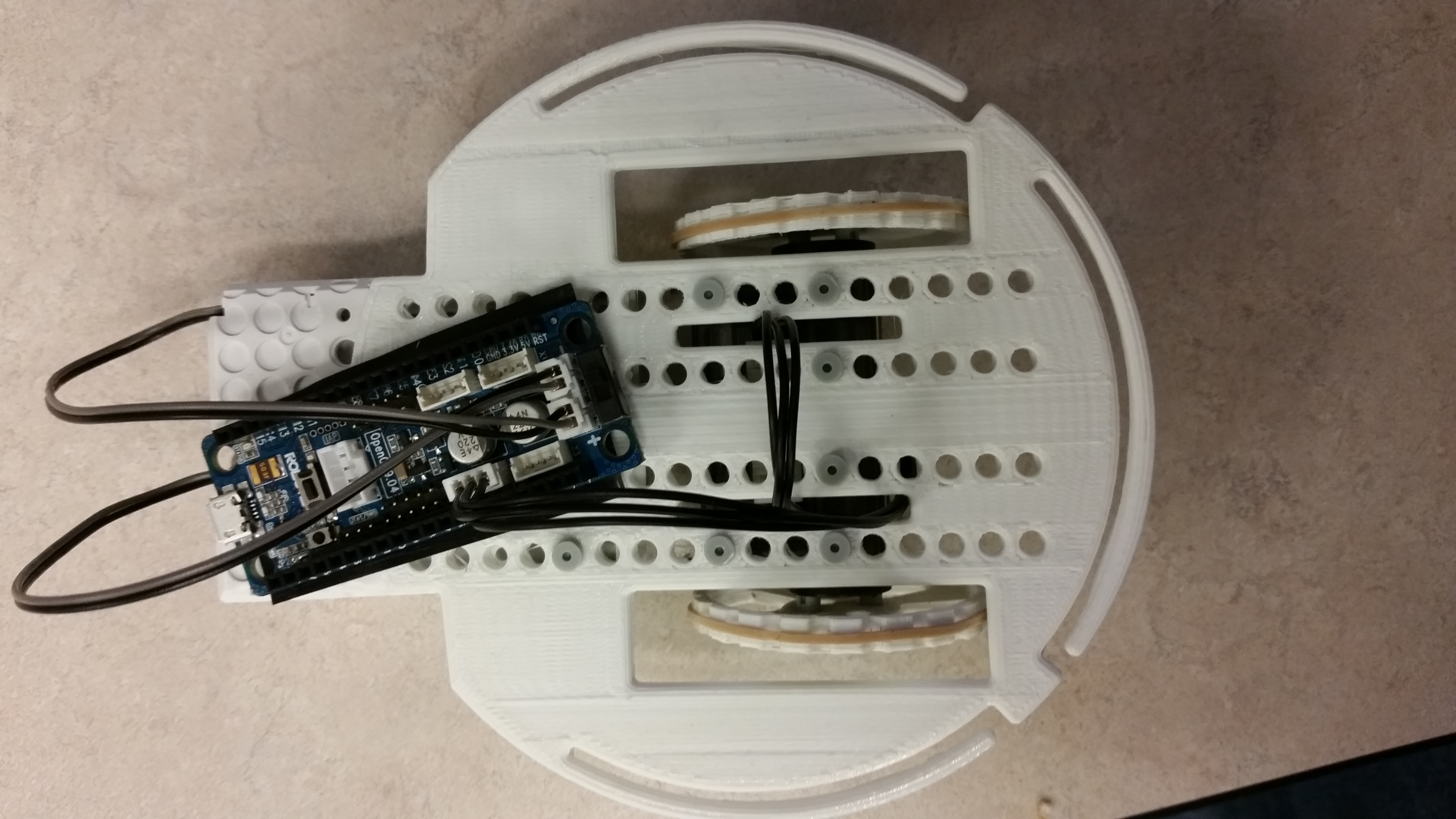
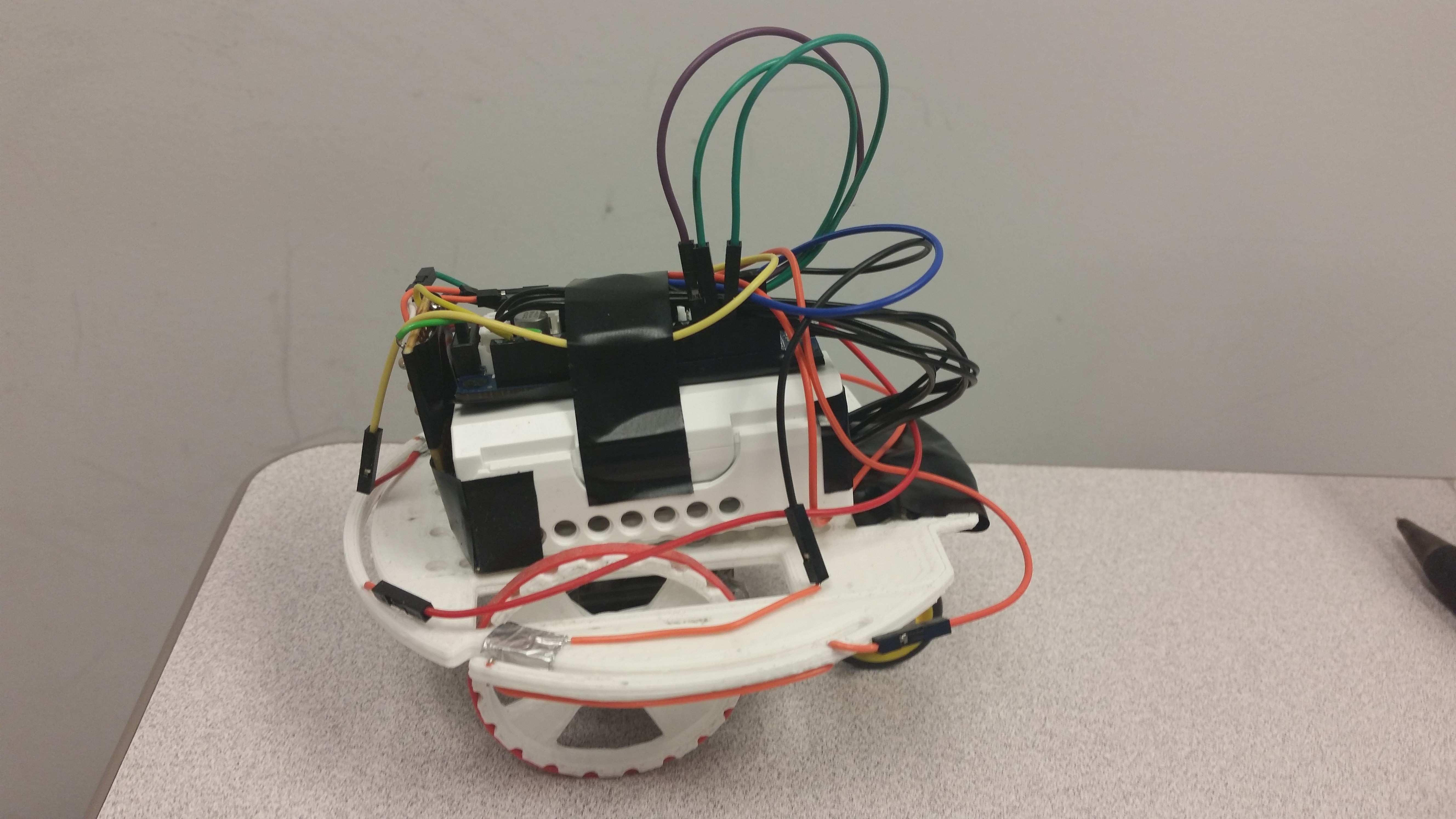
The final design of the Crabot uses three bump switches. These bump switches are designed using wire wrapped around one of three bumpers connected to the 5V out put of the OpenCM micro-controller. When contact is made to a pad made of aluminum foil , one of three digital I/O pins is pulled to High trigging an interrupt in the program and causing the robot to adjust it’s course. Below are the final designs, photos and a video of a test run for the Crabot wall following robot.
Demo1 Design click on the link below to open up the PDF file.
Click the github link for the OpenCM code: https://github.com/jallendc/Demo1/blob/master/working_wheel_final.ino
Click the github link for the “.stl” to make your own Crabot chassis or wheels used for this project:
Chassis: https://github.com/jallendc/Demo1/blob/master/crabot_chasis_mkIV.stl
Wheels: https://github.com/jallendc/Demo1/blob/master/50mm_wheel_treads.stl
Some assembly and final photos of the Crabot.
.

Successful test run of the simple maze.